2008年05月13日
【連載】2007年ロボコン その5
■モータトルクの補助■
以前はよくモータのトルク不足に苦しまされることがありました。
機構の要求に対してモータを選定するのが一般的ですが、
ロボコンのロボットは、重量制限やバッテリー駆動
しなければならないなどの制約があります。
今回はモータに合わせて必要なトルクを軽減する機構を設けました。
アームのモーメント(必要なトルク)を計算して水平状態で
釣り合うように補助ばね(うず巻ばね サミニ社)をつけました。
実際組み付けたところ、ほぼ計算どおりで
水平より5度程度上向きの位置で釣り合いました。
結果的にモータに負担がかからない設計にすることになり、
同時にモータそのものもモータを制御するドライバも
小さく軽くできました。
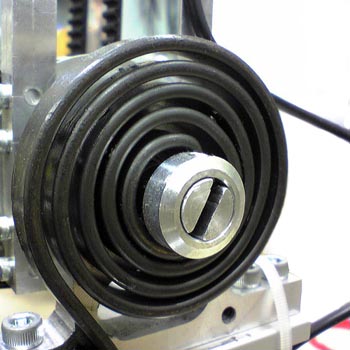
▲うず巻ばね。0.011N・m/degのトルクを受けます。
以前はよくモータのトルク不足に苦しまされることがありました。
機構の要求に対してモータを選定するのが一般的ですが、
ロボコンのロボットは、重量制限やバッテリー駆動
しなければならないなどの制約があります。
今回はモータに合わせて必要なトルクを軽減する機構を設けました。
アームのモーメント(必要なトルク)を計算して水平状態で
釣り合うように補助ばね(うず巻ばね サミニ社)をつけました。
実際組み付けたところ、ほぼ計算どおりで
水平より5度程度上向きの位置で釣り合いました。
結果的にモータに負担がかからない設計にすることになり、
同時にモータそのものもモータを制御するドライバも
小さく軽くできました。

▲うず巻ばね。0.011N・m/degのトルクを受けます。






Posted by 豊田高専ロボコンAチーム at 23:12
│Comments(0)
│2007年ロボコン






