2012年09月03日
通生人口が減ったので、しばらく自分が更新するんじゃなイカ
おはようございます、こんにちは、こんばんは
今日も良かったら見ていってください(人∀・)
学生諸君!! 二学期初日はいかがでしたかな??
自分なんて...初っ端なからテストだったよ...ふェ
明日も復讐 復習試験だのなんだので(←消せてないなんて言わない言わない)
電気科はこの成績によってインターンシップの優先度が変わるらしい
「えーーーーーーー」
そんな余裕ないっす、マジないっす。。。OTL。。。。。。
(正直、インターンシップ先は自分で探すつもりなので優先度など・・・ゲフンゲフン)
とりあえず、頑張ります
お久しぶりの「今日の回路用語」のコーナー
ワーイヽ(゚∀゚)メ(゚∀゚)メ(゚∀゚)ノワーイ
さてさて、今日は実は紹介してなかったシリアル通信「UART」について
USARTやEUSARTとも言ったりしますが、頭文字の説明は長いので省ry
こいつはちょくちょくこのブログ内でも出てくる
XBeeという無線モジュールでの通信だったり
PCとPICとのRS232Cという規格を使った通信などで
使用されたりするのですが・・・・・・
たぶん、PICなどのマイコンの中で2番目くらいにお世話になる機能でしょうね
マイコンによって設定が若干異なったりするとは思いますが、
やってることは一緒なので別のマイコン間との通信でもできるはずです
内容としては、あらかじめ定めておいた速さでデータを送り、それを受け取る
まさにマイコン間のキャッチボールなわけです
キャッチボールなわけですから、ある程度手の抜いた速さで投げるみたいな
相手に合わせた速さ調整が必要なのです(←ここが意外とつまずいたりする)
今、通信がうまくいかないと悩んでいる学生さんがいたら
とりあえず、速さ設定を見てみてはどうでしょうか?
P.S. 明日提出の課題これかr C=(○'○'○) ゝ アンパーンチ

今日も良かったら見ていってください(人∀・)
学生諸君!! 二学期初日はいかがでしたかな??
自分なんて...初っ端なからテストだったよ...ふェ

明日も
電気科はこの成績によってインターンシップの優先度が変わるらしい
「えーーーーーーー」
そんな余裕ないっす、マジないっす。。。OTL。。。。。。
(正直、インターンシップ先は自分で探すつもりなので優先度など・・・ゲフンゲフン)
とりあえず、頑張ります

お久しぶりの「今日の回路用語」のコーナー
ワーイヽ(゚∀゚)メ(゚∀゚)メ(゚∀゚)ノワーイ
さてさて、今日は実は紹介してなかったシリアル通信「UART」について
USARTやEUSARTとも言ったりしますが、頭文字の説明は長いので省ry
こいつはちょくちょくこのブログ内でも出てくる
XBeeという無線モジュールでの通信だったり
PCとPICとのRS232Cという規格を使った通信などで
使用されたりするのですが・・・・・・
たぶん、PICなどのマイコンの中で2番目くらいにお世話になる機能でしょうね
マイコンによって設定が若干異なったりするとは思いますが、
やってることは一緒なので別のマイコン間との通信でもできるはずです
内容としては、あらかじめ定めておいた速さでデータを送り、それを受け取る
まさにマイコン間のキャッチボールなわけです
キャッチボールなわけですから、ある程度手の抜いた速さで投げるみたいな
相手に合わせた速さ調整が必要なのです(←ここが意外とつまずいたりする)
今、通信がうまくいかないと悩んでいる学生さんがいたら
とりあえず、速さ設定を見てみてはどうでしょうか?
P.S. 明日提出の課題これかr C=(○'○'○) ゝ アンパーンチ
2012年04月30日
ペット型ロボットで癒されたい←XBeeの知識が無駄になった泣
こんにちは、こんばんは
回路班のぶりです
みなさん、ついったーやっていますか?
こないだからBチームは公式アカウントをつくって
ブログに貼っていますが・・・・・・
「個人的なつぶやき≒ロボコン関連なつぶやき」
の自分にとってロボコンアカウントができても
使い分けられない気がする;;
でも、ある程度つぶやいてくると
男子高校生たるもの沸き始める(荒れ始める)というのが
自分のフォローしてる人たち(リア友含)なので
自分も沸くようになったら、ロボコン的なことだけ
つぶやける公式アカウントでもつくってみましょうか(笑)
ニュース的なことを流すだけでもアカウントつくる理由になりますしね
さてさて、新ルールが発表されたわけですが
今回は
おいおい、NHK何言ってんだ
自分を始め、春休みにやっと覚えたXBeeによる無線通信は
まったくの無意味になりました
そして、これ(ルールブック P.08 L.08)
『「ペット・ロボット」は、伴走者からボールを受け取る際、「ペットらしい豊かな表情』あるいは「行動」を表現しなければならない』
は?
本当にNHKはやってくれたと思いました
おそらく

のようなロボットを求めているということはわかります。 が、
「表情とかLED並べときゃできるだろ」とか思ってるんですよ、きっと。
たくさんのLEDを操作するにはダイナミックやらなんやら・・・
とりあえず、回路班に押し付けすぎです、NHKさん
P.S.
今回、コントローラは禁止されましたが、どの高専さんも
音、光(色など)といったものを感知できるセンサーを付けて
実質、操縦することができるようにするとは思いますが。。。
おそらく春休みやっていたVC++によるシリアル通信、
またはそれ以上の技術を覚えなくちゃならなくなりそうです
回路班のぶりです

みなさん、ついったーやっていますか?
こないだからBチームは公式アカウントをつくって
ブログに貼っていますが・・・・・・
「個人的なつぶやき≒ロボコン関連なつぶやき」
の自分にとってロボコンアカウントができても
使い分けられない気がする;;
でも、ある程度つぶやいてくると
男子高校生たるもの沸き始める(荒れ始める)というのが
自分のフォローしてる人たち(リア友含)なので
自分も沸くようになったら、ロボコン的なことだけ
つぶやける公式アカウントでもつくってみましょうか(笑)
ニュース的なことを流すだけでもアカウントつくる理由になりますしね

さてさて、新ルールが発表されたわけですが
今回は
コントローラを使わ・・・な・・・い・・・???
おいおい、NHK何言ってんだ

自分を始め、春休みにやっと覚えたXBeeによる無線通信は
まったくの無意味になりました
そして、これ(ルールブック P.08 L.08)
『「ペット・ロボット」は、伴走者からボールを受け取る際、「ペットらしい豊かな表情』あるいは「行動」を表現しなければならない』
は?
本当にNHKはやってくれたと思いました
おそらく

のようなロボットを求めているということはわかります。 が、
「表情とかLED並べときゃできるだろ」とか思ってるんですよ、きっと。
たくさんのLEDを操作するにはダイナミックやらなんやら・・・
とりあえず、回路班に押し付けすぎです、NHKさん
P.S.
今日のつぶやき
今回、コントローラは禁止されましたが、どの高専さんも
音、光(色など)といったものを感知できるセンサーを付けて
実質、操縦することができるようにするとは思いますが。。。
おそらく春休みやっていたVC++によるシリアル通信、
またはそれ以上の技術を覚えなくちゃならなくなりそうです
2012年03月17日
昨日は"新しいiPad" の発売日でした、いやそれだけです
おはようございます、こんにちは、こんばんは~(*´∀`*)
・・・・・・回路班のぶりです。
ちょうど一週間前の更新以来ですが
僕のこと忘れてたりしないですよね? ね
最近は製作側<サイド> しか語られていなかったので
(ぶーは設計者なので仕方ないですがw)
今日は回路側<サイド> について語ります (笑)
前回の僕の記事のときは
大会で使用する基板さえ作っていない状態でしたが
今週でだいぶ進みましたよ~
先週の土日に家で内職して基板を作り、
XBeeによる無線通信も成功し、
(詳しくはこのリンクをクリック:http://www.eleki-jack.com/mycom2/2008/12/xbee1.html )
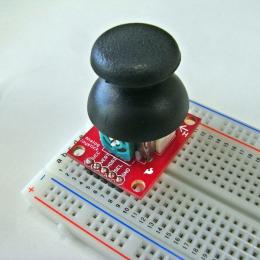
ジョイスティックも使えるようにA/D変換と呼ばれる処理も行うプログラムを組みました (←今日になって反応が悪くなってので調整中)
みなさん、ジョイスティックはわかりますよね?
そうです、アナログパッドとも呼ばれるこれは
S◯NY のP◯2コントローラにもついているアレです
そして試合時間を計測する
タイマのプログラムも書きました (7セグ自体は既存のもの)
とある操作を行うと 『1・2・9』 と 『Ci◯no』 を繰り返すモードに入るようにしたりで・・・・・・
まぁいろいろ大変でした
P.S. 今日の回路用語
A/D変換とは?
A/D変換とは文字通りアナログデータをデジタルデータに変換する処理のことです
ジョイスティックは可変抵抗で出来ています
なので、傾き具合は抵抗値を読むことによって判断します
傾き具合からどの方向に傾いたかは、ある抵抗値を境目と決めて
その抵抗値を超えたら (あるいは下回ったら) この方向に傾いたんだ
と判断します
・・・・・・回路班のぶりです。
ちょうど一週間前の更新以来ですが
僕のこと忘れてたりしないですよね? ね
最近は製作側<サイド> しか語られていなかったので
(ぶーは設計者なので仕方ないですがw)
今日は回路側<サイド> について語ります (笑)
前回の僕の記事のときは
大会で使用する基板さえ作っていない状態でしたが
今週でだいぶ進みましたよ~

先週の土日に家で内職して基板を作り、
XBeeによる無線通信も成功し、
(詳しくはこのリンクをクリック:http://www.eleki-jack.com/mycom2/2008/12/xbee1.html )
ジョイスティックも使えるようにA/D変換と呼ばれる処理も行うプログラムを組みました (←今日になって反応が悪くなってので調整中)
みなさん、ジョイスティックはわかりますよね?
そうです、アナログパッドとも呼ばれるこれは
S◯NY のP◯2コントローラにもついているアレです
そして試合時間を計測する
タイマのプログラムも書きました (7セグ自体は既存のもの)
とある操作を行うと 『1・2・9』 と 『Ci◯no』 を繰り返すモードに入るようにしたりで・・・・・・
まぁいろいろ大変でした
P.S. 今日の回路用語
A/D変換とは?
A/D変換とは文字通りアナログデータをデジタルデータに変換する処理のことです
ジョイスティックは可変抵抗で出来ています
なので、傾き具合は抵抗値を読むことによって判断します
傾き具合からどの方向に傾いたかは、ある抵抗値を境目と決めて
その抵抗値を超えたら (あるいは下回ったら) この方向に傾いたんだ
と判断します

2012年03月10日
新1年生だーーーー!!
こんにちは、回路班のぶりです
・・・・・・おひさしぶりです
毎日更新していたぶーは、
今日から (昨日から?) 山へ旅立ってしまいました。。。
山岳部なんです、彼。
そのため、今日は僕が更新しています
昨日は高専で
合格者オリエンテーションがありました (ワーパチパチ)
(ワーパチパチ)
新1年生のみなさんが、いっぱい来ていました \(^o^)/ (当たり前だ)
初々しいみなさんを見ていると若かりし自分を思い出し・・・・・・
あれ? まだピチピチの17歳ですよ、
世間のいう"青春時代"ってやつですよ、僕。
・・・・・・とりあえず、ロボコンのみんなで盛り上がってましたww
さあて、今の回路班はというと......
現1年生の人たちは大体の仕事を終え、
残るはデューティ比というものを調整しています (デューティ比については後述)
前回の記事でもあった "XBee" と呼ばれる無線モジュールでの
無線通信も成功したようです
一方、僕はテストボードでの通信が終え、
ようやく大会用基板を製作するところです
以上、回路班レポートでした
P.S. 今日の言葉
デューティ (Duty) 比:
モータなどを高速でONとOFFを切り替えることによって
プログラム的にモータの出力を制御するときの比率。
モータを何%の出力で動かすかということ
例えば、ロボットの右足と左足にモータがついていて
それぞれONにしたときの回転数が違うとき、
動かした時にずれが起きるので、出力を調整して
まっすぐ進むようにする時に使います
長くてゴメンナサイ m(_ _)m

・・・・・・おひさしぶりです
毎日更新していたぶーは、
今日から (昨日から?) 山へ旅立ってしまいました。。。
山岳部なんです、彼。
そのため、今日は僕が更新しています
昨日は高専で
合格者オリエンテーションがありました
 (ワーパチパチ)
(ワーパチパチ)新1年生のみなさんが、いっぱい来ていました \(^o^)/ (当たり前だ)
初々しいみなさんを見ていると若かりし自分を思い出し・・・・・・
あれ? まだピチピチの17歳ですよ、
世間のいう"青春時代"ってやつですよ、僕。
・・・・・・とりあえず、ロボコンのみんなで盛り上がってましたww
さあて、今の回路班はというと......
現1年生の人たちは大体の仕事を終え、
残るはデューティ比というものを調整しています (デューティ比については後述)
前回の記事でもあった "XBee" と呼ばれる無線モジュールでの
無線通信も成功したようです

一方、僕はテストボードでの通信が終え、
ようやく大会用基板を製作するところです
以上、回路班レポートでした

P.S. 今日の言葉
デューティ (Duty) 比:
モータなどを高速でONとOFFを切り替えることによって
プログラム的にモータの出力を制御するときの比率。
モータを何%の出力で動かすかということ
例えば、ロボットの右足と左足にモータがついていて
それぞれONにしたときの回転数が違うとき、
動かした時にずれが起きるので、出力を調整して
まっすぐ進むようにする時に使います
長くてゴメンナサイ m(_ _)m
2012年03月08日
バカな!?洪水だとお!?
こんばんは。ぶーです。
もう11時か・・・。春休みはどんどん消えていくなあ・・。
先日XBee(series1 PRO)を、共立エレショップで購入しようとしましたが、タイの洪水の影響で発注がかけれなくなってしまいました・・・
工エエェェ(´д`)ェェエエ工・・・・・
いやはや自然の力には勝てませんねぇ。
代替品で頑張りますか・・。
詳細を知りたい方はこちらをどうぞ↓(英文・・だと・・・)
http://www.digi.com/news/pressrelease?prid=807
ではさようなら(´・ω・`)/~~
もう11時か・・・。春休みはどんどん消えていくなあ・・。
先日XBee(series1 PRO)を、共立エレショップで購入しようとしましたが、タイの洪水の影響で発注がかけれなくなってしまいました・・・
工エエェェ(´д`)ェェエエ工・・・・・
いやはや自然の力には勝てませんねぇ。
代替品で頑張りますか・・。
詳細を知りたい方はこちらをどうぞ↓(英文・・だと・・・)
http://www.digi.com/news/pressrelease?prid=807
ではさようなら(´・ω・`)/~~






