2008年06月16日
【連載】2007年ロボコン その14
長かったテスト週間が終わりました
まだテストは満載だけど・・・
■昇圧回路■
電池はロボットの重量に大きく関わっています。単3電池でさえ
一本50グラムあるのであなどれません。ロボットの
軽量化をするために制御回路用の電池まで当初予定より減らしました。
設計上、制御回路が上部下部の2系統あるので、
電池も単4電池4本×2セット必要でした。
フルスペックのままでは、制御用電池だけで400グラムもあります。
そこでMC34065とよばれるDC-DCコンバータICを使用して
電池3本(4.5V)から7Vに昇圧し、それを低ドロップ
三端子レギュレータ4905にて5Vにレギュレートする方法を使いました。
一度7Vに昇圧するのは、電源の安定化とノイズの減少をはかる
ためです。
その結果、上部・下部制御それぞれ1本ずつ電池を減らすことができました。

▲右上の精密多回転抵抗の周辺が昇圧回路
平滑コンデンサが4つ付いています
MC34063はパーツショップではなかなか手に入りませんが、
大手100円ショップザ・ダイソーで販売されている、車載用携帯電話充電器
(シガーソケットから携帯電話を充電するもの)を分解すると入っています。
100円ショップのくせに315円ですが、ショットキーダイオードや
インダクタ、抵抗など、昇圧に必要な部品のほとんど入ってているため、
パーツショップで入手するより意外とお得です。
MC34063はステップアップコンバータ(昇圧)、ステップダウンコンバータ(降圧)、
電圧インバータ(電圧反転=負電圧をつくる)、レギュレータ(安定化)など
豊富な応用ができます。
電子工作をする方なら手元にいつもあると便利なICだと思います。
是非使ってみてください。

まだテストは満載だけど・・・
■昇圧回路■
電池はロボットの重量に大きく関わっています。単3電池でさえ
一本50グラムあるのであなどれません。ロボットの
軽量化をするために制御回路用の電池まで当初予定より減らしました。
設計上、制御回路が上部下部の2系統あるので、
電池も単4電池4本×2セット必要でした。
フルスペックのままでは、制御用電池だけで400グラムもあります。
そこでMC34065とよばれるDC-DCコンバータICを使用して
電池3本(4.5V)から7Vに昇圧し、それを低ドロップ
三端子レギュレータ4905にて5Vにレギュレートする方法を使いました。
一度7Vに昇圧するのは、電源の安定化とノイズの減少をはかる
ためです。
その結果、上部・下部制御それぞれ1本ずつ電池を減らすことができました。

▲右上の精密多回転抵抗の周辺が昇圧回路
平滑コンデンサが4つ付いています
MC34063はパーツショップではなかなか手に入りませんが、
大手100円ショップザ・ダイソーで販売されている、車載用携帯電話充電器
(シガーソケットから携帯電話を充電するもの)を分解すると入っています。
100円ショップのくせに315円ですが、ショットキーダイオードや
インダクタ、抵抗など、昇圧に必要な部品のほとんど入ってているため、
パーツショップで入手するより意外とお得です。
MC34063はステップアップコンバータ(昇圧)、ステップダウンコンバータ(降圧)、
電圧インバータ(電圧反転=負電圧をつくる)、レギュレータ(安定化)など
豊富な応用ができます。
電子工作をする方なら手元にいつもあると便利なICだと思います。
是非使ってみてください。
2008年05月27日
【連載】2007年ロボコン その13
■保安用主電源リレー■
制御回路の電源を入れる前に駆動電源を入れると、
モータドライバが燃え出すおそれがあります。
一昨年まではロボコン部屋で多くのモータドライバが
煙をあげて亡くなりました。
そこで制御回路系の電源が入っていないときは
バッテリーからの電力が遮断されるように
駆動電源にリレーを入れました。
また機械が予期せぬ動作をしたときに
制御回路の電源を切ることで、
すべての動作を遮断することができます。
リレーは半導体と比べかなり電力を消費しますが、
リレーのコイルは制御系の電源で駆動しています。
そのため制御系の電池の消耗がはやくなりました。
もう少し省エネの保安器を開発したいです。
FET並列+ヒートシンクでいけるかな・・・

▲保安リレー
制御回路の電源を入れる前に駆動電源を入れると、
モータドライバが燃え出すおそれがあります。
一昨年まではロボコン部屋で多くのモータドライバが
煙をあげて亡くなりました。
そこで制御回路系の電源が入っていないときは
バッテリーからの電力が遮断されるように
駆動電源にリレーを入れました。
また機械が予期せぬ動作をしたときに
制御回路の電源を切ることで、
すべての動作を遮断することができます。
リレーは半導体と比べかなり電力を消費しますが、
リレーのコイルは制御系の電源で駆動しています。
そのため制御系の電池の消耗がはやくなりました。
もう少し省エネの保安器を開発したいです。
FET並列+ヒートシンクでいけるかな・・・

▲保安リレー
2008年05月26日
【連載】2007年ロボコン その12
■複数個所受信(上下分離式)■
スリップリングによって電源はターンテーブルより上に、
供給できますが、制御用信号はターンテーブルの
上下でやりとりできません。
回転の中心にはターンテーブル駆動用のシャフトが
通るので、市販の小信号用スリップリングを使うわけ
にはいきません。
そのため制御信号はコントローラからの赤外線信号を
上下それぞれ独立して受信・解析することにしました。
従って上下間のフィードバックや同期はできませんが、
もしどちらか一方に問題が生じても上下は完全に
独立した系にあるため、被害が広がる可能性が低くできます。
また、赤外線の最大の弱点である他校との混信を防ぐために
3種類の変調周波数(36.7,38.0,40.0kHz)の受光モジュールを
使用しています。
テストラン等で混信が認められれば他の周波数を使用できます。

▲下部受光モジュールセット

▲上部受光モジュールセット
スリップリングによって電源はターンテーブルより上に、
供給できますが、制御用信号はターンテーブルの
上下でやりとりできません。
回転の中心にはターンテーブル駆動用のシャフトが
通るので、市販の小信号用スリップリングを使うわけ
にはいきません。
そのため制御信号はコントローラからの赤外線信号を
上下それぞれ独立して受信・解析することにしました。
従って上下間のフィードバックや同期はできませんが、
もしどちらか一方に問題が生じても上下は完全に
独立した系にあるため、被害が広がる可能性が低くできます。
また、赤外線の最大の弱点である他校との混信を防ぐために
3種類の変調周波数(36.7,38.0,40.0kHz)の受光モジュールを
使用しています。
テストラン等で混信が認められれば他の周波数を使用できます。

▲下部受光モジュールセット

▲上部受光モジュールセット
2008年05月22日
【連載】2007年ロボコン その11
■配線の効率化■
今まではモータなどの配線ケーブルを
自動車の電装で多用されるギボシ端子や、
基盤へ直接ハンダ付けして使用していました。
しかしギボシ端子は抜き差しに力が必要で、
基盤のハンダ付けにも負担がかかります。
過去には豊田市主催のロボコンの当日にケーブルが
基盤からランドごと電線がはがれてしまったこともありました。
そのときは幸いにも軽負荷のモータのケーブルだったので、
絶縁用ビニールテープで乗り切りましたが、
NHKのロボコンではそうも行きません
そこで力を必要とせず、また回路に負担をかけない
配線をするために端子台を採用しました。
一般的には端子台を用いるのは
特段珍しくもなんともないとおもいますが、
重量制限と数グラム単位で戦うロボコンとしては
見逃せない重量になります。(54グラムでした)
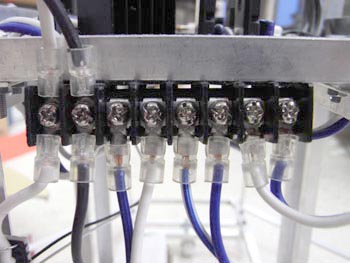
▲ロボット本体の配電・制御端子台

▲ターンテーブルより上部の配電・制御端子台
試合中に配線が抜け落ちてしまわないように、
端子は丸型を使用しました。
回路をモジュール化と併せて、
フレキシブルな制御回路の構築には
欠かせないアイテムだと思います。
急な仕様変更でも安心です。
今まではモータなどの配線ケーブルを
自動車の電装で多用されるギボシ端子や、
基盤へ直接ハンダ付けして使用していました。
しかしギボシ端子は抜き差しに力が必要で、
基盤のハンダ付けにも負担がかかります。
過去には豊田市主催のロボコンの当日にケーブルが
基盤からランドごと電線がはがれてしまったこともありました。
そのときは幸いにも軽負荷のモータのケーブルだったので、
絶縁用ビニールテープで乗り切りましたが、
NHKのロボコンではそうも行きません
そこで力を必要とせず、また回路に負担をかけない
配線をするために端子台を採用しました。
一般的には端子台を用いるのは
特段珍しくもなんともないとおもいますが、
重量制限と数グラム単位で戦うロボコンとしては
見逃せない重量になります。(54グラムでした)

▲ロボット本体の配電・制御端子台

▲ターンテーブルより上部の配電・制御端子台
試合中に配線が抜け落ちてしまわないように、
端子は丸型を使用しました。
回路をモジュール化と併せて、
フレキシブルな制御回路の構築には
欠かせないアイテムだと思います。
急な仕様変更でも安心です。
2008年05月22日
【連載】2007年ロボコン その10
■スリップリング■
ロボットのアームはターンテーブル上に設置されているため、
回転するテーブル上にいかにして電源を送るかが
問題となりました。
電源のバッテリーは1キロを超えるため
複数載せるのは重量制限を考えると非現実的です。
またケーブルを使用すると操縦者が常にどちらに
何回転したか意識しなければからまってしまいます。
そこでスライド接点(ブラシ)を用いて、
回転数・回転方向をまったく気にせずに操縦できる
スリップリングを採用しました。
ブラシはカーボン、リングは銅でできています。

▲ブラシ
一般的なスリップリングでは
電極が軸の円周に沿って巻きつけられていますが、
軸に銅箔を絶縁して巻くのはむつかしいため、
ベークライト板に銅箔がはられた生基板をポケット加工して、
+-の電極としました。

▲電極
結果、電源供給は良好で、
回転しながらでも確実に供給できましたが、
電極の+・-が水平に配置されているため
ボルトやナット等の金属を落とすと、
+-両電極の間にまたがってしまう危険はあります。
ロボットのアームはターンテーブル上に設置されているため、
回転するテーブル上にいかにして電源を送るかが
問題となりました。
電源のバッテリーは1キロを超えるため
複数載せるのは重量制限を考えると非現実的です。
またケーブルを使用すると操縦者が常にどちらに
何回転したか意識しなければからまってしまいます。
そこでスライド接点(ブラシ)を用いて、
回転数・回転方向をまったく気にせずに操縦できる
スリップリングを採用しました。
ブラシはカーボン、リングは銅でできています。

▲ブラシ
一般的なスリップリングでは
電極が軸の円周に沿って巻きつけられていますが、
軸に銅箔を絶縁して巻くのはむつかしいため、
ベークライト板に銅箔がはられた生基板をポケット加工して、
+-の電極としました。

▲電極
結果、電源供給は良好で、
回転しながらでも確実に供給できましたが、
電極の+・-が水平に配置されているため
ボルトやナット等の金属を落とすと、
+-両電極の間にまたがってしまう危険はあります。
2008年05月20日
【連載】2007年ロボコン その9
■回路のモジュール化■
回路の設計、製作には結構時間がかかります。
ロボコンではたいてい以下のような流れで
回路をつくります。
回路図作成
↓
実態配線図作成
↓
部品取り付け
↓
プログラム,
かなり効率よくやっても最短で20~30時間の仕事になります。
大きい基盤になるとプログラム含め100時間を越します。
やはり大会前の急な仕様変更は命取りになりがちです。
昨年は回路の配線規格を統一して、
ドライバ系をモジュール化することで、
フレキシブルな回路を作ることを目指しました。
たとえば、モータの変更であれば、
同じ配線規格の高容量なドライバに取替えるだけで
簡単にできるはずです。

▲モータドライバ(試作品)

▲CPU基盤

▲サーボドライバ基盤

▲モータドライバ2(試作品)
▲ロボットへ取付状態

▲ハンダ面。スズめっき線で配線してあります。

▲実態配線図。回路図はパソコンで作りますが、
実態配線図だけは、いまだに方眼紙と鉛筆で手書きです。
(クリックで拡大します)
回路の設計、製作には結構時間がかかります。
ロボコンではたいてい以下のような流れで
回路をつくります。
回路図作成
↓
実態配線図作成
↓
部品取り付け
↓
プログラム,
かなり効率よくやっても最短で20~30時間の仕事になります。
大きい基盤になるとプログラム含め100時間を越します。
やはり大会前の急な仕様変更は命取りになりがちです。
昨年は回路の配線規格を統一して、
ドライバ系をモジュール化することで、
フレキシブルな回路を作ることを目指しました。
たとえば、モータの変更であれば、
同じ配線規格の高容量なドライバに取替えるだけで
簡単にできるはずです。

▲モータドライバ(試作品)

▲CPU基盤

▲サーボドライバ基盤

▲モータドライバ2(試作品)
▲ロボットへ取付状態

▲ハンダ面。スズめっき線で配線してあります。

▲実態配線図。回路図はパソコンで作りますが、
実態配線図だけは、いまだに方眼紙と鉛筆で手書きです。
(クリックで拡大します)
2008年05月20日
【連載】2007年ロボコン その8
■ターンテーブル■
ロボットの自由度をさらに上げるために、
垂直方向の軸を設けました。
垂直軸は回転角を意識せず使えるように、
多回転できるようになっています。
スラスト(軸方向)荷重をうける軸受けは、
一般的にはスラストベアリングですが、
直径が比較的小さいので、
軸の曲げに対する強度が十分必要になります。
重量や加工を考えると大径軸も使用できません。
そこで今回採用したのは、
中華テーブルです。
建築金物のメーカーから、
ターンテーブルの金物部分を取り寄せました。

▲ターンテーブル金物
ターンテーブルは直径が大きいため、
ターンテーブル上部のモーメントは
下部に影響を与えることなくほぼ収束しています。
また、環状なので中央部には空間があります。
この空間にスリップリングを取り付けました。
(スリップリングについてはその10で取り上げます)

▲アーム部はすべてターンテーブル上についています。
ロボットの自由度をさらに上げるために、
垂直方向の軸を設けました。
垂直軸は回転角を意識せず使えるように、
多回転できるようになっています。
スラスト(軸方向)荷重をうける軸受けは、
一般的にはスラストベアリングですが、
直径が比較的小さいので、
軸の曲げに対する強度が十分必要になります。
重量や加工を考えると大径軸も使用できません。
そこで今回採用したのは、
中華テーブルです。
建築金物のメーカーから、
ターンテーブルの金物部分を取り寄せました。

▲ターンテーブル金物
ターンテーブルは直径が大きいため、
ターンテーブル上部のモーメントは
下部に影響を与えることなくほぼ収束しています。
また、環状なので中央部には空間があります。
この空間にスリップリングを取り付けました。
(スリップリングについてはその10で取り上げます)

▲アーム部はすべてターンテーブル上についています。
2008年05月15日
【連載】2007年ロボコン その7
■剛性を重視した設計■
昨年は騎馬戦という競技課題の性質上、
相手校のロボットとの接触は避けられないため、
接触しても破壊しない強度が必要でした。
そこで構造材の一部にアルミフレームを使用しました。
アルミフレームはアルミをダイス(型)から押し出して
成形(マカロニと同じです)しているので安価です。
また複雑な断面形状からわかるように剛性が高いです。
アルミフレームに取り付ける部品は写真のように凸部を設けて、
フレームの溝と肩がきくようにしました。
またナットは専用の段つきナットを用いてさらに
高強度になるようにしました。

▲アルミフレームの溝にはまる段

▲アルミフレーム
昨年は騎馬戦という競技課題の性質上、
相手校のロボットとの接触は避けられないため、
接触しても破壊しない強度が必要でした。
そこで構造材の一部にアルミフレームを使用しました。
アルミフレームはアルミをダイス(型)から押し出して
成形(マカロニと同じです)しているので安価です。
また複雑な断面形状からわかるように剛性が高いです。
アルミフレームに取り付ける部品は写真のように凸部を設けて、
フレームの溝と肩がきくようにしました。
またナットは専用の段つきナットを用いてさらに
高強度になるようにしました。

▲アルミフレームの溝にはまる段

▲アルミフレーム
2008年05月14日
【連載】2007年ロボコン その6
■オルダム型カップリング■
ロボットの多くの構造材はアルミ(A6063)で、
アングル材や角パイプ材です。
加工時はスケールやハイトゲージでけがき、手でポンチを
打っています。するとどうしても精度が低くなりがちで、
大きい部品になると±0.5ミリ以上の誤差が生じて
しまうこともあります。
「±0.5ミリの誤差」は小さく感じるかもしれません。
しかし直径3ミリのネジの穴は大きくても3.5ミリです。
2つの部品があって、片方が+0.5もう一方が-0.5の誤差があれば
穴は1ミリもずれてしまいます。
ボルト締結の場合はアルミのたわみで何とかなるのですが、
回転軸どうしの固定はそうはいきません。回転すると偏心は振動になります。
クルマのエンジンが振動するのも、エンジンの構造上
クランク軸が偏心しているからです。
今回もターンテーブル上にのせたアームを
確実に回転させるためには誤差が大きくなりすぎるため、
大きな偏心誤差を許容するオルダム型カップリングを採用しました。
このカップリングで半径方向2.5ミリ、
偏角3°を吸収することができます。

▲オルダム型カップリングの構造

▲取り付け状態
ロボットの多くの構造材はアルミ(A6063)で、
アングル材や角パイプ材です。
加工時はスケールやハイトゲージでけがき、手でポンチを
打っています。するとどうしても精度が低くなりがちで、
大きい部品になると±0.5ミリ以上の誤差が生じて
しまうこともあります。
「±0.5ミリの誤差」は小さく感じるかもしれません。
しかし直径3ミリのネジの穴は大きくても3.5ミリです。
2つの部品があって、片方が+0.5もう一方が-0.5の誤差があれば
穴は1ミリもずれてしまいます。
ボルト締結の場合はアルミのたわみで何とかなるのですが、
回転軸どうしの固定はそうはいきません。回転すると偏心は振動になります。
クルマのエンジンが振動するのも、エンジンの構造上
クランク軸が偏心しているからです。
今回もターンテーブル上にのせたアームを
確実に回転させるためには誤差が大きくなりすぎるため、
大きな偏心誤差を許容するオルダム型カップリングを採用しました。
このカップリングで半径方向2.5ミリ、
偏角3°を吸収することができます。

▲オルダム型カップリングの構造

▲取り付け状態
2008年05月13日
【連載】2007年ロボコン その5
■モータトルクの補助■
以前はよくモータのトルク不足に苦しまされることがありました。
機構の要求に対してモータを選定するのが一般的ですが、
ロボコンのロボットは、重量制限やバッテリー駆動
しなければならないなどの制約があります。
今回はモータに合わせて必要なトルクを軽減する機構を設けました。
アームのモーメント(必要なトルク)を計算して水平状態で
釣り合うように補助ばね(うず巻ばね サミニ社)をつけました。
実際組み付けたところ、ほぼ計算どおりで
水平より5度程度上向きの位置で釣り合いました。
結果的にモータに負担がかからない設計にすることになり、
同時にモータそのものもモータを制御するドライバも
小さく軽くできました。
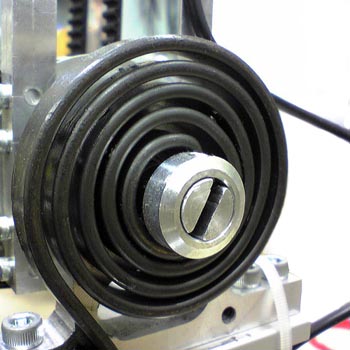
▲うず巻ばね。0.011N・m/degのトルクを受けます。
以前はよくモータのトルク不足に苦しまされることがありました。
機構の要求に対してモータを選定するのが一般的ですが、
ロボコンのロボットは、重量制限やバッテリー駆動
しなければならないなどの制約があります。
今回はモータに合わせて必要なトルクを軽減する機構を設けました。
アームのモーメント(必要なトルク)を計算して水平状態で
釣り合うように補助ばね(うず巻ばね サミニ社)をつけました。
実際組み付けたところ、ほぼ計算どおりで
水平より5度程度上向きの位置で釣り合いました。
結果的にモータに負担がかからない設計にすることになり、
同時にモータそのものもモータを制御するドライバも
小さく軽くできました。

▲うず巻ばね。0.011N・m/degのトルクを受けます。
2008年05月12日
【連載】2007年ロボコン その4
■ギアボックスの軽量化■
今回使用した日本サーボ社のDCモータは
ギアボックスカバーの肉厚が大きく、最大10ミリ近くあります。
競技課題の重量制限が大きな壁となっていて、
編み出した苦肉の策が、カバーを削ってしまうことです。
かといっても強度がなくなってしまってはいけないので、
過去に廃品となった同種モータのギアボックスカバー
4隅の角をのこして側面を大きく削り取るテストをして
剛性に問題がないことを確認しました。
最も高トルクのモータ以外の2つのモータのカバーを加工しました。
また厚さ0.2ミリのPET樹脂板をギアボックス内部に巻きつけ、
グリスの飛散防止と危険防止を図りました。
なぜか毎年重量制限に泣かされています・・・
学習機能のないことorz
 <
<
▲ミニ四駆もびっくりの無残な姿。
今回使用した日本サーボ社のDCモータは
ギアボックスカバーの肉厚が大きく、最大10ミリ近くあります。
競技課題の重量制限が大きな壁となっていて、
編み出した苦肉の策が、カバーを削ってしまうことです。
かといっても強度がなくなってしまってはいけないので、
過去に廃品となった同種モータのギアボックスカバー
4隅の角をのこして側面を大きく削り取るテストをして
剛性に問題がないことを確認しました。
最も高トルクのモータ以外の2つのモータのカバーを加工しました。
また厚さ0.2ミリのPET樹脂板をギアボックス内部に巻きつけ、
グリスの飛散防止と危険防止を図りました。
なぜか毎年重量制限に泣かされています・・・
学習機能のないことorz
 <
<▲ミニ四駆もびっくりの無残な姿。
2008年05月08日
【連載】2007年ロボコン その3
こんばんは。
今日から12回で2007年に初めて使った技術を紹介します!
『技術』といっても…
年々削られる予算とルールの重量制限に苦しめられて
異常な状態の部品や考えられない使い方をしているものたちです。
たまげること請け合いです
■オープンエンドタイミングベルトの採用■
過去にタイミングベルトを使用した例は多くあるのですが、
エンドレスベルトや融着ベルトが用いられていました。
エンドレスベルトや融着ベルトはどえらい高いので、
オープンエンドベルトを購入し、ベルトを途中で継ぐ方法を使っています。
この機械はベルト使用が多いため、1~2万円程度の予算圧縮できました。

接合はベルトの両端を突合せて、その歯に同種のベルトを
100ミリ程度のベルト片で歯をかけてあてがい、ボルトでベルトサイドを固定。
この方法ではベルトを傷つけないため、強度の損失が小さいはず。
見てのとおり多回転(ベルトが半周以上する)の場合は
プーリが接合部を噛みこむので使えないです。
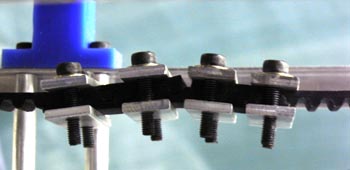
押さえはA6063ですが、ネジがきってあって、
ナットをかけずに使っていますが意外と大丈夫です。
オーバーホールしてるとそのうちダメになります。
今日から12回で2007年に初めて使った技術を紹介します!
『技術』といっても…
年々削られる予算とルールの重量制限に苦しめられて
異常な状態の部品や考えられない使い方をしているものたちです。
たまげること請け合いです

■オープンエンドタイミングベルトの採用■
過去にタイミングベルトを使用した例は多くあるのですが、
エンドレスベルトや融着ベルトが用いられていました。
エンドレスベルトや融着ベルトはどえらい高いので、
オープンエンドベルトを購入し、ベルトを途中で継ぐ方法を使っています。
この機械はベルト使用が多いため、1~2万円程度の予算圧縮できました。

接合はベルトの両端を突合せて、その歯に同種のベルトを
100ミリ程度のベルト片で歯をかけてあてがい、ボルトでベルトサイドを固定。
この方法ではベルトを傷つけないため、強度の損失が小さいはず。
見てのとおり多回転(ベルトが半周以上する)の場合は
プーリが接合部を噛みこむので使えないです。

押さえはA6063ですが、ネジがきってあって、
ナットをかけずに使っていますが意外と大丈夫です。
オーバーホールしてるとそのうちダメになります。
2008年05月07日
【連載】2007年ロボコン その2
こんばんは。
今年の競技課題がえ~らい難しいです。
今日はアイディア発表の日だったのですが、
1件しか出なかった。。orz
・・・アイディア出しは結構難航しています。
なんか思いついたら教えてください
ルールはコチラ
というわけで引き続き昨年のロボットの紹介です。
前回はロボットの概要を紹介しました。
2回目はロボット全体を見せます
▲上部外観。ターンテーブルとその駆動モータが確認できます。

▲概略図面
ココが見たい!という要望があればコメントからお願いします。
できる範囲でお答えしたいです。
今年の競技課題がえ~らい難しいです。
今日はアイディア発表の日だったのですが、
1件しか出なかった。。orz
・・・アイディア出しは結構難航しています。
なんか思いついたら教えてください
ルールはコチラ
というわけで引き続き昨年のロボットの紹介です。
前回はロボットの概要を紹介しました。
2回目はロボット全体を見せます

▲上部外観。ターンテーブルとその駆動モータが確認できます。

▲概略図面
ココが見たい!という要望があればコメントからお願いします。
できる範囲でお答えしたいです。
2008年05月02日
【連載】2007年ロボコン その1
4月25日にロボコンの競技課題が発表されました。
最近は新入生も含めてアイディア出しをしています。
今日からしばらくは昨年のロボットについて紹介します!!
まずは昨年のルールから。
第20回の競技課題は、
相手ロボットの持つ旗を取り合う「ロボット騎馬戦」です。
各チームは、2台の「騎馬ロボット」を製作します。
騎馬ロボットはチーム全体で5本の「旗」を持ち、
赤、白2チームに別れて対戦します。
8m四方のフィールドのなかで、計4台のロボットが自由自在に動き、
相手の持つ旗をめぐって攻防を繰り広げます。試合時間は3分間。
相手チームの5本の旗を全て奪うと大勝利です。
走る、つかむ、耐える・・・騎馬戦には、あらゆる機能が要求されます。
なかでも、「ものをつかむ」腕や、ぶつかられても壊れない耐久性は、
救助ロボットや介護ロボットで最も注目されている技術です。
「最先端のニーズにアイデアと技術で迫る」、
それが今回のロボット騎馬戦のテーマです。
(NHK高専ロボコン公式ルールブックより)
■ロボットの概要
3軸アームの先端に取り付けられた吸い取りファンによって相手の旗を吸い取り、
地面に落下させます。ターンテーブルより上は無制限に回転できます。
コントローラより赤外線で制御で、ジョイスティック2本とスイッチ6つで、
ジョイスティックの一方で走行もう一方でアームの操縦をします。
スイッチでは吸い込みの入切や、負圧を高めるカバーの動作に充てられています。
電源は動力用鉛蓄電池(12V)及び制御回路用単4乾電池3本×2。

▲アームの関節部(第2軸)

▲アームの関節部(第1軸) 下に見えるリングがターンテーブルです。

▲先端の吸い取りファン
最近は新入生も含めてアイディア出しをしています。
今日からしばらくは昨年のロボットについて紹介します!!
まずは昨年のルールから。
第20回の競技課題は、
相手ロボットの持つ旗を取り合う「ロボット騎馬戦」です。
各チームは、2台の「騎馬ロボット」を製作します。
騎馬ロボットはチーム全体で5本の「旗」を持ち、
赤、白2チームに別れて対戦します。
8m四方のフィールドのなかで、計4台のロボットが自由自在に動き、
相手の持つ旗をめぐって攻防を繰り広げます。試合時間は3分間。
相手チームの5本の旗を全て奪うと大勝利です。
走る、つかむ、耐える・・・騎馬戦には、あらゆる機能が要求されます。
なかでも、「ものをつかむ」腕や、ぶつかられても壊れない耐久性は、
救助ロボットや介護ロボットで最も注目されている技術です。
「最先端のニーズにアイデアと技術で迫る」、
それが今回のロボット騎馬戦のテーマです。
(NHK高専ロボコン公式ルールブックより)
■ロボットの概要
3軸アームの先端に取り付けられた吸い取りファンによって相手の旗を吸い取り、
地面に落下させます。ターンテーブルより上は無制限に回転できます。
コントローラより赤外線で制御で、ジョイスティック2本とスイッチ6つで、
ジョイスティックの一方で走行もう一方でアームの操縦をします。
スイッチでは吸い込みの入切や、負圧を高めるカバーの動作に充てられています。
電源は動力用鉛蓄電池(12V)及び制御回路用単4乾電池3本×2。

▲アームの関節部(第2軸)

▲アームの関節部(第1軸) 下に見えるリングがターンテーブルです。

▲先端の吸い取りファン






