2008年05月08日
【連載】2007年ロボコン その3
こんばんは。
今日から12回で2007年に初めて使った技術を紹介します!
『技術』といっても…
年々削られる予算とルールの重量制限に苦しめられて
異常な状態の部品や考えられない使い方をしているものたちです。
たまげること請け合いです
■オープンエンドタイミングベルトの採用■
過去にタイミングベルトを使用した例は多くあるのですが、
エンドレスベルトや融着ベルトが用いられていました。
エンドレスベルトや融着ベルトはどえらい高いので、
オープンエンドベルトを購入し、ベルトを途中で継ぐ方法を使っています。
この機械はベルト使用が多いため、1~2万円程度の予算圧縮できました。

接合はベルトの両端を突合せて、その歯に同種のベルトを
100ミリ程度のベルト片で歯をかけてあてがい、ボルトでベルトサイドを固定。
この方法ではベルトを傷つけないため、強度の損失が小さいはず。
見てのとおり多回転(ベルトが半周以上する)の場合は
プーリが接合部を噛みこむので使えないです。
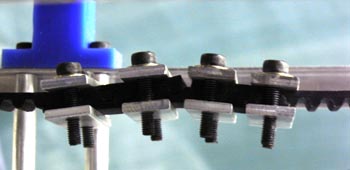
押さえはA6063ですが、ネジがきってあって、
ナットをかけずに使っていますが意外と大丈夫です。
オーバーホールしてるとそのうちダメになります。
今日から12回で2007年に初めて使った技術を紹介します!
『技術』といっても…
年々削られる予算とルールの重量制限に苦しめられて
異常な状態の部品や考えられない使い方をしているものたちです。
たまげること請け合いです

■オープンエンドタイミングベルトの採用■
過去にタイミングベルトを使用した例は多くあるのですが、
エンドレスベルトや融着ベルトが用いられていました。
エンドレスベルトや融着ベルトはどえらい高いので、
オープンエンドベルトを購入し、ベルトを途中で継ぐ方法を使っています。
この機械はベルト使用が多いため、1~2万円程度の予算圧縮できました。

接合はベルトの両端を突合せて、その歯に同種のベルトを
100ミリ程度のベルト片で歯をかけてあてがい、ボルトでベルトサイドを固定。
この方法ではベルトを傷つけないため、強度の損失が小さいはず。
見てのとおり多回転(ベルトが半周以上する)の場合は
プーリが接合部を噛みこむので使えないです。

押さえはA6063ですが、ネジがきってあって、
ナットをかけずに使っていますが意外と大丈夫です。
オーバーホールしてるとそのうちダメになります。






Posted by 豊田高専ロボコンAチーム at 23:02
│Comments(0)
│2007年ロボコン






